LIN-Bus
Abstract
Der LIN-Bus basiert auf dem ISO 9141 Standard und wurde als kostengünstiges Datenübertragungssystem speziell für den Einsatz in Kraftfahrtzeugen konzipiert. Er wird hauptsächlich für einfache Bedienelemente und Sensoren genutzt. Die Datenrate ist mit bis zu 20 kBit/s relativ gering und er besitzt nur begrenzte Störfestigkeit.
Technische Daten
- „Ein-Draht“ Bus-System. Sowohl Sende- als auch Empfangsdaten werden abwechselnd über ein und dieselbe Datenleitung übertragen (= Halbduplex-Kommunikation).
- Single-Master, Multiple Slaves Bus-Konzept. Ein Master initiiert und koordiniert die Kommunikation der Slaves. Die Slaves senden nur nach Aufforderung vom Master.
- Günstige Implementation durch große Auswahl an fertigen Bausteinen.
- Selbst-Synchronisierend, ohne Quarz oder Keramikresonator in den Slaves. Das Taktsignal wird dabei aus dem Datensignal gewonnen.
- Das UART-Datenformat ist einheitlich: 1 Start-Bit, 8 Daten-Bits, 1 Stopp-Bit und kein Paritäts-Bit
- Mögliche Baudraten sind: 2400, 9600 und 19200
Das Protokoll
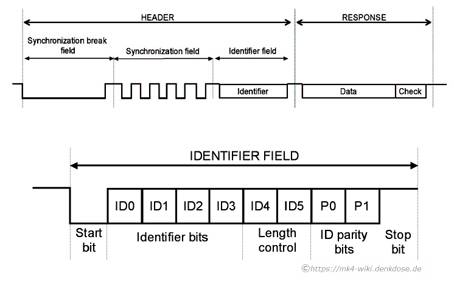
Der Master schaltet in den Sendemodus und erzeugt zunächst ein BREAK. Dieses besteht aus eine Folge von 13 Low-Bits, 1 High Bit und 1 Low Bit. Nun folgt das 8-Bit lange SYNC-Field, welches dem Bitmuster 10101010 entspricht. Anschließend das ID Field, mit einem Start-Bit (Low), den 5 ID-Bits (ID0..ID4), der Datenlänge (ID5, ID6), der Parität (P0, P1) und dem Stopp-Bitt.
Nun schaltet der Master in den Empfangsmodus. Ab jetzt senden die Slaves ihre Daten.
Am Schluss werden die Daten noch mit der CHECKSUM geprüft.
Die Kommunikationstabelle:
Jeder Frame gehört zu einem Steuergerät. Eine solche Tabelle hat 2 Spalten und x Zeilen (x = Anzahl der Frames bzw. Steuergeräte/ Sensoren). In den Spalten stehen die Delay-Zeiten zwischen den Frames und der eigentliche Frame mit seiner ID.
In einer Routetine (State-Machine) wird eine „Tick“-Funktion jede Millisekunde aufgerufen. In ihr wird entschieden ob das Delay eines Frames erreicht ist. In diesem Fall wird der Frame gesendet, in die nächste Zeile der Tabelle gesprungen und das ganze so wiederholt.
Die "LDF"-Datenbank
Die LDF beschreibt die Signale und wie sie in einem LIN-Frame zusammengesetzt sind. Zusätzlich steht noch drin, welche Teilnehmer am Bus sind und in welchem zeitlichen Raster der Master die Slaves abfragt („Schedule Table“).
Sie wird für Analyse-Software benötigt, damit diese die Bussignale richtig deuten und Fehler aufzeigen kann.
LIN-Busse und Module im Mondeo
| Master | LIN-Bus | Modul-Kürzel | Modul-Bezeichnung |
|---|---|---|---|
BCM | LIN0 | IRX | RF RECEIVER - Funkempfänger für Zentralverriegelung, Keyless-Schlüssel und RDKS-Sensoren |
BCM | LIN1 | LSM | LIGHT SWITCH MODULE - Lichtschalter |
BCM | LIN1 | SWM | STEERING WHEEL MODULE - Lenkradmodul |
BCM | LIN2 (=LIN8) | IMS | INTERIOR MOTION SENSOR - Innenraum-Bewegungsmelder der Alarmanlage |
BCM | LIN8 (=LIN8) | WMM | SMART WIPER MOTOR MODULE MASTER - Scheibenwischermotor |
BCM | LIN8 (=LIN2) | RSM | RAIN SENSOR MODULE - Regensensor |
BCM | LIN8 (=LIN2) | BBS | SIREN CONTROL MODULE - Sirene der Alarmanlage |
BCM | LIN2 (=LIN8) | BMS | BATTERY MONITOR SENSOR - Batteriesensor |
LIN-Bus Module
| Kurz | Langform | Bedeutung |
|---|---|---|
| A/C | Air Conditioning | Klimaanlage |
| LIN1 | LSM | Light-Switch-Module |
| ABE | Allgemeine Betriebserlaubnis | Erlaubnis zum Betrieb von Kraftfahrzeugen und ihrer Ausrüstungsteile |
| ABS | Anti-lock Braking System | Anti-Blockier-System, Traktions- und Stabilitätskontrolle (ESP) |
| ACC | Adaptive Cruise Control | Adaptives Geschwindigkeitsregelsystem |
| ACM | Audio Control Module | Modul Audiogerät (Radio) |
| AFL | Adaptive-Forward-Lightning | Sich anpassendes Voraus-Licht, bestehend aus mitlenkenden Scheinwerfern und Abbiegelicht |
| AFS | Adaptive-Front-Lightning-System | Abhängig von Tempo und Lenkeinschlag mitlenkende Hauptscheinwerfer |
| AGR | Abgasrückführung | //Deutsches Kürzel für EGR.// |
| AH | Ampere Hours | Batterieleistung in Amperestunden |
| AHCM | Auxiliary Heater Control | Kraftstoffbetriebene Zuheizer/Standheitung |
| AHK | Anhängerkupplung | |
| APIM | Accessory Protocol Interface Module | Ford SYNC Modul |
| APP | Acceleration Pedal Position | Positions-Sensor im Gaspedal |
| ATS | Air Temperature Sensor | Lufttemperatur-Sensor |
| AU | Abgasuntersuchung | Teil der gesetzlichen, technischen Kontrolle des KFZ |
| BBS | Battery Backed-Up Sounder | Diebstahlwarnanlage |
| BC | Bordcomputer | |
| BCM | Body Control Module | Zentralelektrikbox, enthält Fahrzeugsteuerung, CAN-Gateway und Sicherungen |
| BCMii | Body Control Module 2 | //Nachfolger des BCM// |
| BDA | Bedienungsanleitung | Gemeint ist das Handbuch vom Mondeo |
| BKV | Bremskraftverstärker | |
| BLIS | Blind Spot Detection System | Toter-Winkel Assistent (Anzeige im Aussenspiegel) |
| BMS | Battery-Management-Sensor | Batterieüberwachung |
| BPP | Break Pedal Position | Bremspedalstellung (Betätigung) |
| BTCS | Antischlupfregelung mit Bremseingriff | |
| CAC | Ladeluftkühler | |
| CAN | Controller Area Network | Hochgeschwindigkeits-Netzwerk für Steuersysteme |
| CCD | Continuously Controlled Damping | Permanent gesteuerte StoÃdämpfer |
| CCM | Cruise Control Module | Modul Geschwindigkeitsregelsystem (Tempomat) |
| CDDJ | Externer CD-Player mit Wechlser | |
| CJB | Central Junktion Box | //Siehe BCM// |
| CMP | Nockenwellenstellung | |
| CMR | Modul der Einparkkamera (Linienprojektion) | |
| CNG | Compressed Natural Gas | Motor mit komprimierten Erdgas als Kraftstoff |
| COC | Certificate of conformity | EG-Ãbereinstimmungsbescheinigung |
| CPP | Clutch Pedal Position | Kupplungspedalstellung (Betätigung) |
| CTM | Zentral Timer Modul | |
| D1S | Sockelbauweise Gasentladungslampe ( Xenon ) | |
| DA | Driver Alert | Müdigkeitswarner |
| DABM | Digital Audio Broadcast Module | Digitales Audio Empfangsmodul (DAB) |
| DDM | Driver Door Module | Türsteuermodul Fahrertür (Fensterheber, Spiegel, Blinker, etc.) |
| DLC | Diagnostic Link Connector | OBD-Diagnosestecker |
| DPF | Dieselpartikelfilter | Einrichtung zur Reduzierung der im Abgas von Dieselmotoren enthaltenen RuÃpartikel |
| DRL | Daytime Running Light | Tagfahrlicht. Im Facelift-Mondeo eine zusätzliche LED-Leuchte unterhalb der Hauptscheinwerfer |
| DSM | Driver Seat Module | Fahrersitz-Modul |
| DTC | Diagnostic Trouble Code | OBD2-Fehlercodes aus Steuermodulen |
| EATC | Electronic Automatic Temperature Control | Modul automatische Temperaturregelung |
| EBA | Emergency Break Assistent | Notbremsassistent |
| EBD | Elektronische Bremskraftverteilung | |
| ECM | Engine Control Module | Motorsteuergerät |
| ECT | Kühlmitteltemperatur | |
| EGR | Exhaust Gas Recirculation | Abgasrückführventil |
| EI | Elektronische Zündung | |
| EOBD | European\On Board Diagnostic | Europäische On Board Diagnose (OBD) |
| EOP | Motoröldruckschalter | |
| EPAS | Elektrisch unterstützte Servolenkung | |
| ESC | Electronic Stability Control | //Englischer Begriff für ESP// |
| ESP | Elektronisches Stabilitäts Programm | Traktions- und Stabilitätskontrolle //Siehe auch ABS// |
| ETIS | Elektronisches Informationssystem | |
| EVAP | Magnetventil Kraftstoffverdunstung | |
| FB | Fernbedienung | |
| FFH | Freundlicher Ford Händler | Aus der Werbesprache adaptierter Begriff (nicht ganz ernst gemeint) |
| FH | Fensterheber | |
| FINIS | Ford International Numeric Identificatio | Identifizierungssystem für Ford-Ersatzteile |
| FL | Facelift | Optisch und technisch überarbeiteter Mondeo (ab Bj. 09/2010) |
| FoMoCo | Ford Motor Corporation | Logo auf original Ford-Teilen |
| FPDM | Modul Kraftstoffpumpe | |
| GEM | General Electronics Module | //Alternative Bezeichnung für BCM// |
| GFM | CD Wechsler | |
| GND | Ground | Elektrische 'Fahrzeugmasse', Minuspol der Batterie/Generator |
| GPS | Global Positioning System | Satellitengestütztes Navigationssystem |
| HBZ | Hauptbremszylinder | |
| HCM | Headlight Control Module | Modul Scheinwerfer |
| HCU | Hydraulische Regeleinheit | |
| HVAC | Heating Ventilation Air Conditioning | Steuermodul Heizung, Belüftung & Klimaanlage |
| IAC | Leerlaufregelungsventil | |
| IAT | Ansauglufttemperatur | |
| iB5 | 5-Gang Schaltgetriebe (nur 1,6L Zetec-Benziner) | |
| IC | //Alternative Bezeichnung für IPC// | |
| IDS | neuste Version Ford Testgerät | |
| IFS | Kraftstoffsicherheitsabschaltung | |
| IMS | Interior-Monitoring-Sensor | Innenraumüberwachungssensor der Diebstahlwarnanlage |
| IPC | Intrument Panel Cluster | Kombiinstrument (Tacho) |
| IPMA | Image Processing Module "A" | Frontkamera (Spurassistent) |
| IVDC | Interactive Vehicle Dynamic Control | Einstellbare StoÃdämpfer Fahrprofile |
| KS | Klopfsensor | |
| KVM | Keyless Vehicle Module | Modul schlüsselloses SchlieÃ- und Startsystem |
| LDW | Lane Departure Warning | Fahrspurassistent |
| LIN | Local Interconnect Network | Serielles Ein-Draht-Bussystem für einfache MeÃ- und Steuerfunktion |
| LMM | Luftmassenmesser | |
| LSM | Light-Switch-Module | Lichtschalter-Modul |
| LWR | Leuchtweitenregulierung | |
| MAF | Luftmassenstrom | |
| MAP | Saugrohrdruck | |
| MAPT | Saugrohrdruck & Temperatur | |
| MIL | Malfunction Indicator Lamp | Motorkontrollleuchte. Sammelstöranzeige für Motorstörungen. |
| MK4 | Mark Four | Bezeichnung der vierten Modellgeneration des Mondeo |
| MMT6 | 6-Gang Schaltgetriebe | |
| MTX75 | 5-Gang Schaltgetriebe | |
| NSW | Nebelscheinwerfer | |
| OBD | On-Board-Diagnose | Schnittstelle zum auslesen von DTCs und zur Fahrzeugprogrammierung |
| OCS | Occupent Classification System | Beifahrererkennung (Sitz-Sensor) |
| OSS | Abtriebswellendrehzahl | |
| oT | oberer Totpunkt | |
| PAD | Schalter Beifahrerdeaktivierung | |
| PAM | Parking Aid Module | Modul für die Einparkhilfe |
| PATS | Wegfahrsperre | |
| PCM | Powertrain Control Module | Antriebsstrangsteuergerät |
| PDC | Park Distance Control | Einparkhilfe |
| PDM | Passenger Door Module | Modul Beifahrertür |
| PNP | Park/Neutralstellung | |
| PSCM | Power Steering Control Module | Modul Hydraulische Servolenkung |
| PSP | Schalter Servolenkungsdruck | |
| PTU | tragbare Testeinheit ( IDS ) | |
| PWM | Pulse Width Modulation | Pulsweitemodulierung. Impulse im gleichen Abstand, mit variable Länge |
| RCM | Restraints Control Module | Modul Sicherheitsrückhaltesysteme (Airbag, Gurt) |
| RDKS | Reifendruck-Kontrollsystem | //Siehe auch TPMS// |
| RDM | Rear Door Module | Passagiertürmodul, Fahrer- od. Beifahrerseite |
| RDS | Radio Data System | Ãbertragungssystem für Textinformationen (z.B. Liedtitel) über Radiosender |
| RFA | Remote Frequency Actuator | Funkempfängermodul der Fernentriegelung |
| RFK | //Siehe RVC// | |
| RKE | Fernentriegelung | |
| RSM | Rain-Sensor-Module | Regensensor |
| RVC | Rear View Camera | Rückfahrkamera |
| SASM | Steering Angle Sensor Module | Lenkwinkelsensor |
| SDARS | Satellite Digital Audio Radio Service | |
| SECM | Steering Effort Control Module | Modul Elektrische Servolenkung |
| SJB | Smart Junction Box | //Siehe BCM, GEM// |
| SODL | Side Obstacle Detection Control Module Left | Modul Seitenhinderniserkennung links (BLIS) |
| SODR | Side Obstacle Detection Control Module Right | Modul Seitenhinderniserkennung rechts (BLIS) |
| SPRM | Kommunikationsmodul | |
| SRM | Speech Recognition System | Modul Freisprecheinrichtung, Bluetooth, Sprachsteuerung |
| SWM | Steering Wheel Module | Lenkradmodul |
| TC | Turbolader | |
| TCC | Wandlerüberbrückungskupplung | |
| TCM | Transmission Control Module | Getriebesteuergerät |
| TCU | Drosselklappensteuereinheit | |
| TDCi | Turbo Diesel Common-Rail Injection | Ford Diesel-Triebwerk mit Kraftstoffeinspritzung und Turbolader |
| TFT | Getriebeöltemperatur | |
| TP | Drosselklappenstellung | |
| TPMS | Tyre Pressure Measurement System | Reifendruck-Kontrollsystem //Siehe RDKS// |
| TRM | Trailer Module | Anhängermodul |
| TSS | Turbinenwellendrehzahl | |
| uT | unterer Totpunkt | |
| VCM | Kommunikationseinheit IDS | |
| VCM-II | Nachfolger von der VCM Diagnosegerätes | |
| VCT | Nockenwellenverstellung | |
| VDM | Modul Fahrwerksstabilisierung | |
| vFL | vor Facelift | Wird in der Community für die Mondeo-Modelle 2007-2010 verwendet |
| VIN | Vehicle Identification Number | Fahrgestellnummer |
| VQM | Voltage Quality Module | Steuermodul zur Batterieüberwachung |
| VSS | Vehicle Speed Sensor | Geschwindigkeitssensor |
| WDS | Vorgänger Testsystem von IDS | |
| WOT | Vollaststellung | |
| WSS | Wind Schutz Scheibe | |
| ZV | Zentral Verriegelung |
LIN-Hardware
- LIN-Bus Transceiver:
- MC33660
- L9637
- TJA1020 (Uralt) bzw. der Nachfolger TJA1021
Links
- Protokoll:
- Eine vollständige Beschreibung des LIN-Protokolls und seiner Implentation finden man hier: LIN_Specification_Package_2.2A.pdf
- Tools:
- Implementationen (Software):
- lin.c - Ein in C für Atmel AVR's geschriebene Emulation aus diesem Forumsbeitrag